orcasynth
Health Warn
- License — License: MIT
- Description — Repository has a description
- Active repo — Last push 0 days ago
- Low visibility — Only 5 GitHub stars
Code Pass
- Code scan — Scanned 12 files during light audit, no dangerous patterns found
Permissions Pass
- Permissions — No dangerous permissions requested
No AI report is available for this listing yet.
Self-hosted daemon that orchestrates autonomous AI coding agents (Claude Code, OpenCode, Codex) — autopilot missions, guardrails, REST API, CLI, and a real-time web UI.
Orcasynth
Control autonomous coding agents — without losing control.
Plan the work, launch isolated coding agents, watch every session live, and step in
before a risky change ever reaches your codebase.
Plan · Dispatch · Observe · Intervene
Orcasynth is a self-hosted daemon that orchestrates autonomous coding agents
(Claude Code, OpenCode, Codex, Kilo Code, Pi, oh-my-pi) in isolated tmux sessions — with
a REST API, a CLI, and a real-time Next.js web UI. No SaaS, no lock-in: your machine, your
agents, your code.
![]()
![]()
![]()
![]()
Why Orcasynth
Coding agents are powerful but messy to run at scale: one terminal per agent, no shared
view of what's happening, and no safety net when an agent decides to rm -rf something.
Orcasynth puts a control plane in front of them. Hand it a goal and it plans the work,
spawns the right agent for each step in its own tmux session, streams every keystroke to
your browser, and gates dangerous actions behind a human when you want it to. When you
trust it more, you turn the autonomy up; when you trust it less, you turn it down.
What it does
- Autopilot planning. Give the Pilot a goal and an LLM decomposes it into a dependency
DAG of phases, chains them by dependency, and can name an agent per phase. Phases only
start once the phases they depend on are done — and independent phases run in parallel up
to your session limit, each in its own isolated worktree, instead of a forced linear chain. - Per-model descriptions & per-phase model selection. Write a capability description
for each model in Settings, flip on "Autopilot picks the model," and the planner chooses
the best-suited model for each phase from those descriptions — validated against your
allow-list, falling back to the default on anything invalid. - PR-native autopilot. Instead of editing your checkout mid-flight, a mission can run
like a disciplined engineer on a branch: it works in an isolated git worktree (under<repo-parent>/.orca-worktrees/), commits each approved phase as it lands, then runs your
verify command, pushes the branch, and opens a GitHub pull request. Orca ingests the PR's
review feedback —CHANGES_REQUESTEDandCOMMENTEDreviews (so bot reviewers and plain
human comments both count) plus inline diff comments — folds it back through the Pilot as
1..N fix phases, and pushes the fixes to the same PR. A fix-round budget (2 automatic
rounds) stops review ping-pong loops: once it's spent, the mission stalls and escalates to
a human instead of looping forever. The UI exposes a PR badge, the fix-round count, and
merge-to-main / continue-mission actions; merging gates on the PR being open, mergeable,
and CI-green. Auth uses a configured GitHub token or falls back to the machine'sghCLI
login. Configurable globally in Settings → GitHub and overridable per project
(Inherit / On / Off), so each project runs its own workflow. - Agent-agnostic spawning. Runs Claude Code, OpenCode, Codex, Kilo Code, Pi, or
oh-my-pi in isolatedtmuxsessions, configurable per task — as workers and as the
autopilot's Pilot/Overseer. Each provider is a first-class executor with its own brand
icon and launch flags in Settings → Providers, and each agent receives the task
context and closes its own task when it's done. - Autonomy levels (L0–L3). Choose how much rope each mission gets — from
L0 · Recommend (plan only, nothing runs until you approve) through L1 · Assist
and L2 · Pilot to L3 · Auto (full autonomy). The overseer's decision engine
auto-clears agent permission prompts when confidence is high and the action is safe, and
escalates anything destructive or uncertain to a human. Operations likerm -rf, dropping
tables, force-pushes, or touching.envalways escalate, whatever the level. - Live web UI with one-click intervention. Tasks, a kanban board with a calendar (and
date-range filtering), missions with phase progress, a timeline with an activity feed and a
"changes over time" view that turns recent git history into an interactive commit stream
plus a most-active-files roll-up, an escalations queue for review-gate decisions, and
real-timetmuxsession previews you can jump into and take over. The Pilot's planning run
streams live in the task modal too, expandable into the full session terminal. Each preview
is a real PTY streamed over a WebSocket (xterm), so you type straight into the agent —
native cursor, smooth scrolling, full key support — not a read-only mirror. A dedicated Stats page shows per-model token/cost breakdown. Creating a
project is point-and-click too: a Browse button opens a server-side folder picker to
choose the path instead of typing it, and you pick a project icon (from an image already
in the repo) right after creating it. Full EN/CS internationalization built in, and the
whole dashboard is responsive down to a phone. - Phone push notifications. Launch a swarm and walk away from the keyboard — Orca pings
your phone only when a mission actually needs you. A review escalation, an agent waiting on
input, or a stalled run arrives as a Web Push notification with inline action buttons
(Approve / Re-run / Allow / Reject / Open) that act through the service worker without
opening the app; mission-done / PR-opened arrives as a tap-to-open FYI. Opt in per device
from your Account, and notifications route to the mission's owner plus admins. A VAPID
keypair is generated on first boot and the private key never leaves the daemon. - Self-healing. A stuck-session detector revives agents that die without closing out
(and blocks the task after repeated failures instead of crash-looping). A janitor sweeps
up finished sessions. Live token and cost usage is shown per run. - Multi-user RBAC with self-service. Admin and member roles, per-project assignments,
per-user model allow-lists, profiles and avatars, and a first-run onboarding that needs
no login until the first admin is created. Users can change their password, upload an
avatar, and manage push-notification devices from their own account page. - Per-user Assistant. Each user gets a persistent assistant agent (
orca-advisor-<userId>)
that drives Orca on their behalf through a built-in MCP server. The server exposes seven
tools —orca_tasks,orca_create_task,orca_plan,orca_sessions,orca_note_add,orca_notes, and the genericorca_requestpassthrough that reaches any REST endpoint —
so a brand-new endpoint is callable with zero new tooling. Auto-starts on login, remembers
its model, and runs in a docked IDE-style side panel with a real-PTY terminal. Pop any
session terminal out into its own chromeless window for focus. - Self-hosted & lightweight. A single SQLite-backed daemon (Hono + SSE) plus a Next.js
front end. No external services required beyond your own LLM provider.
Screenshots
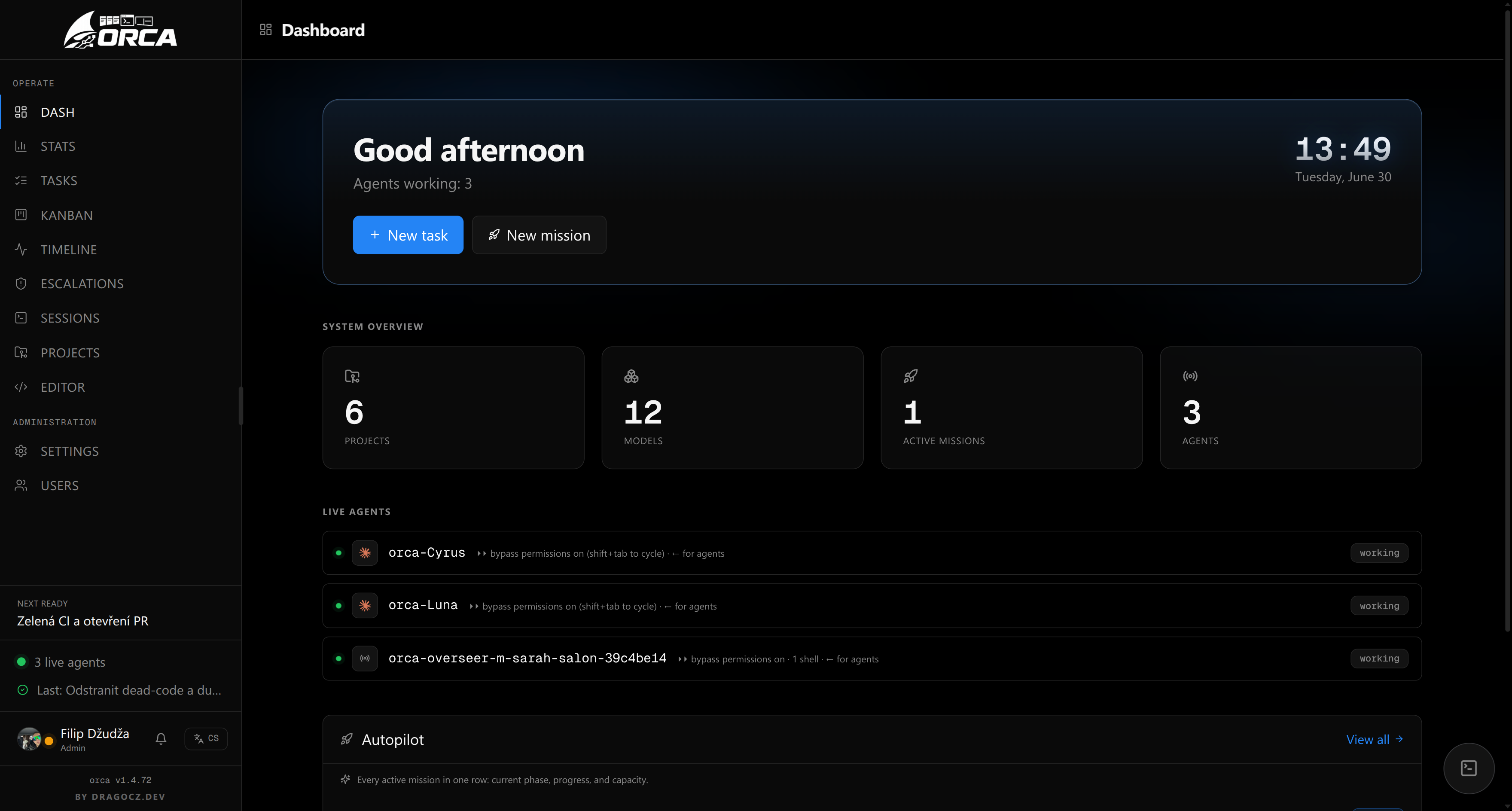
Dashboard — live agents, active missions, the autopilot spotlight, and recent outcomes at a glance.
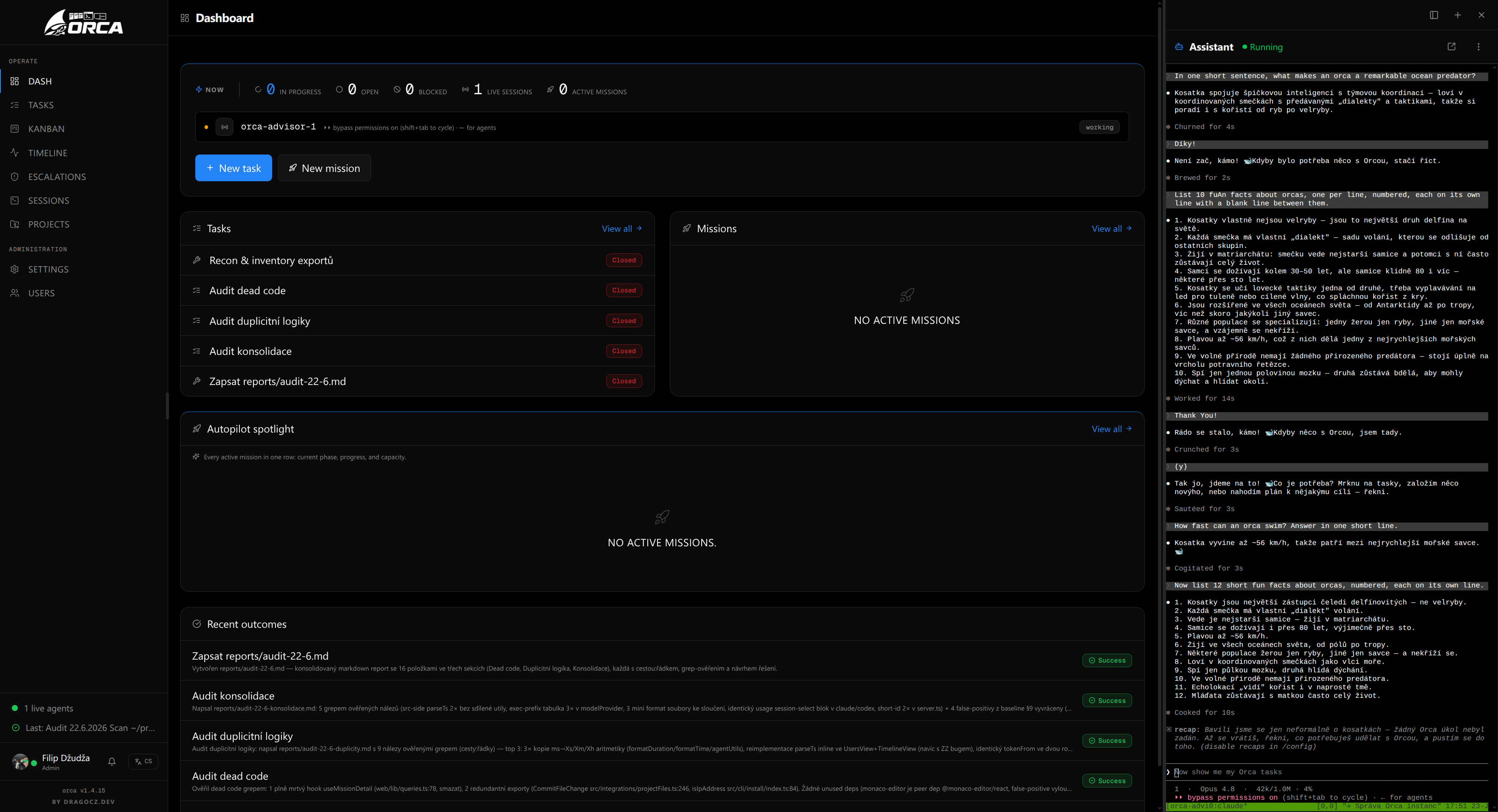
Assistant panel — a docked, dock-left/right, resizable IDE-style side column. Watch your always-on AI assistant and a running agent next to the main view, with a model picker that shows per-provider brand icons.
Tasks — list + detail with live agent output and token usage. 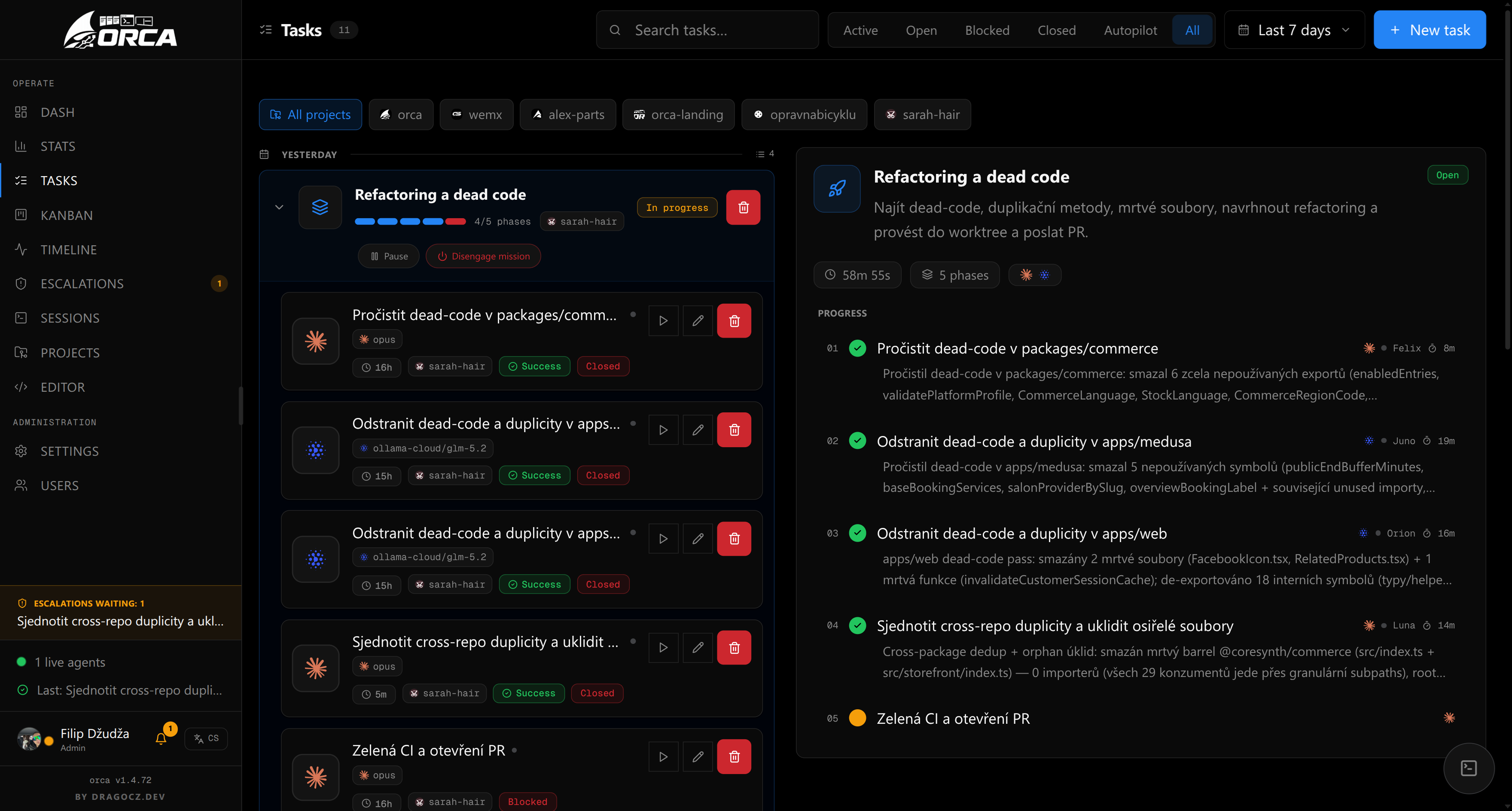 |
Kanban — open / in-progress / blocked / closed, with mission progress and a calendar. 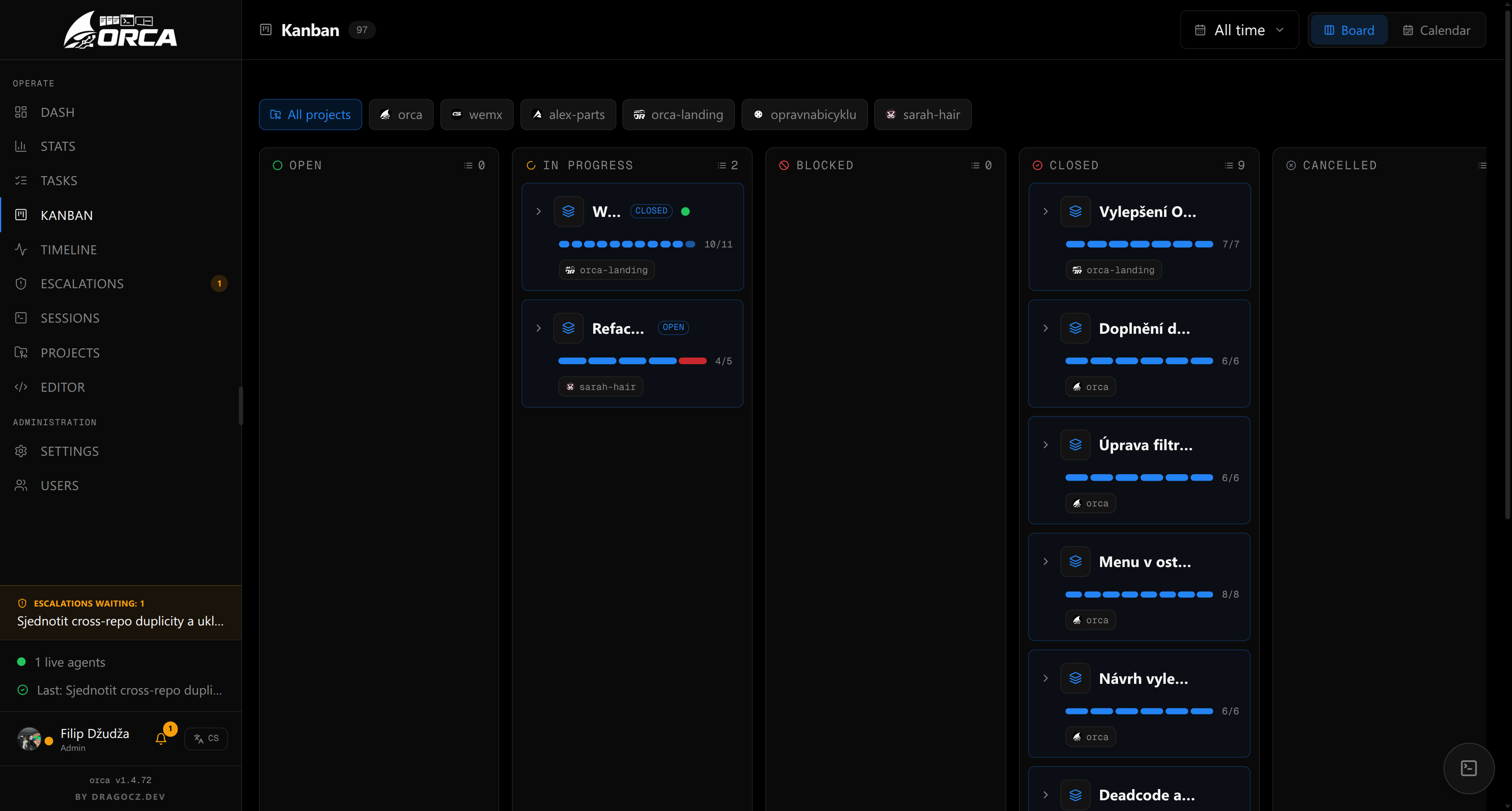 |
Missions — phase graph and task flow for an autopilot run (folded into Tasks). 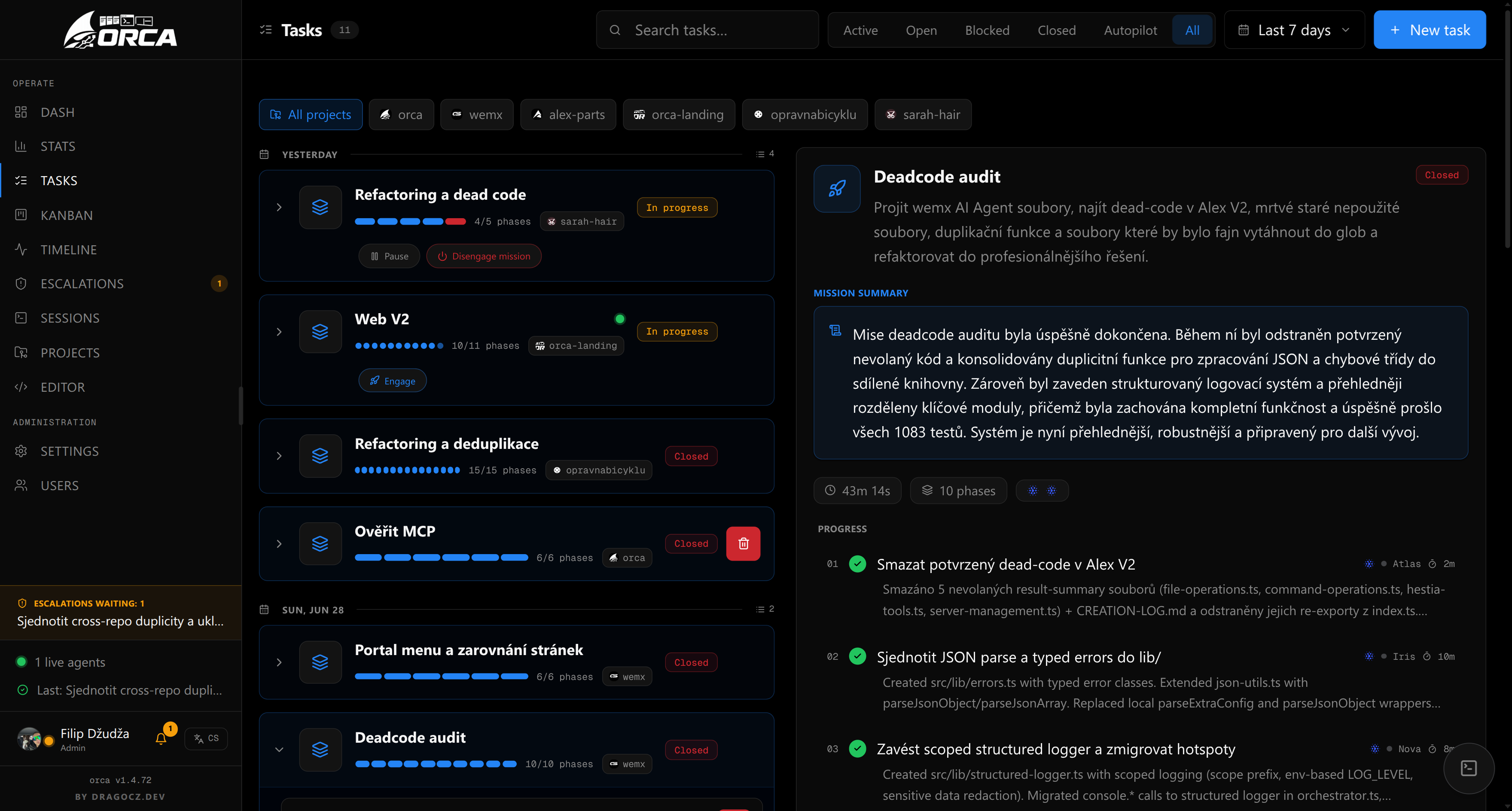 |
Timeline — a live activity feed across tasks, missions, and signals. 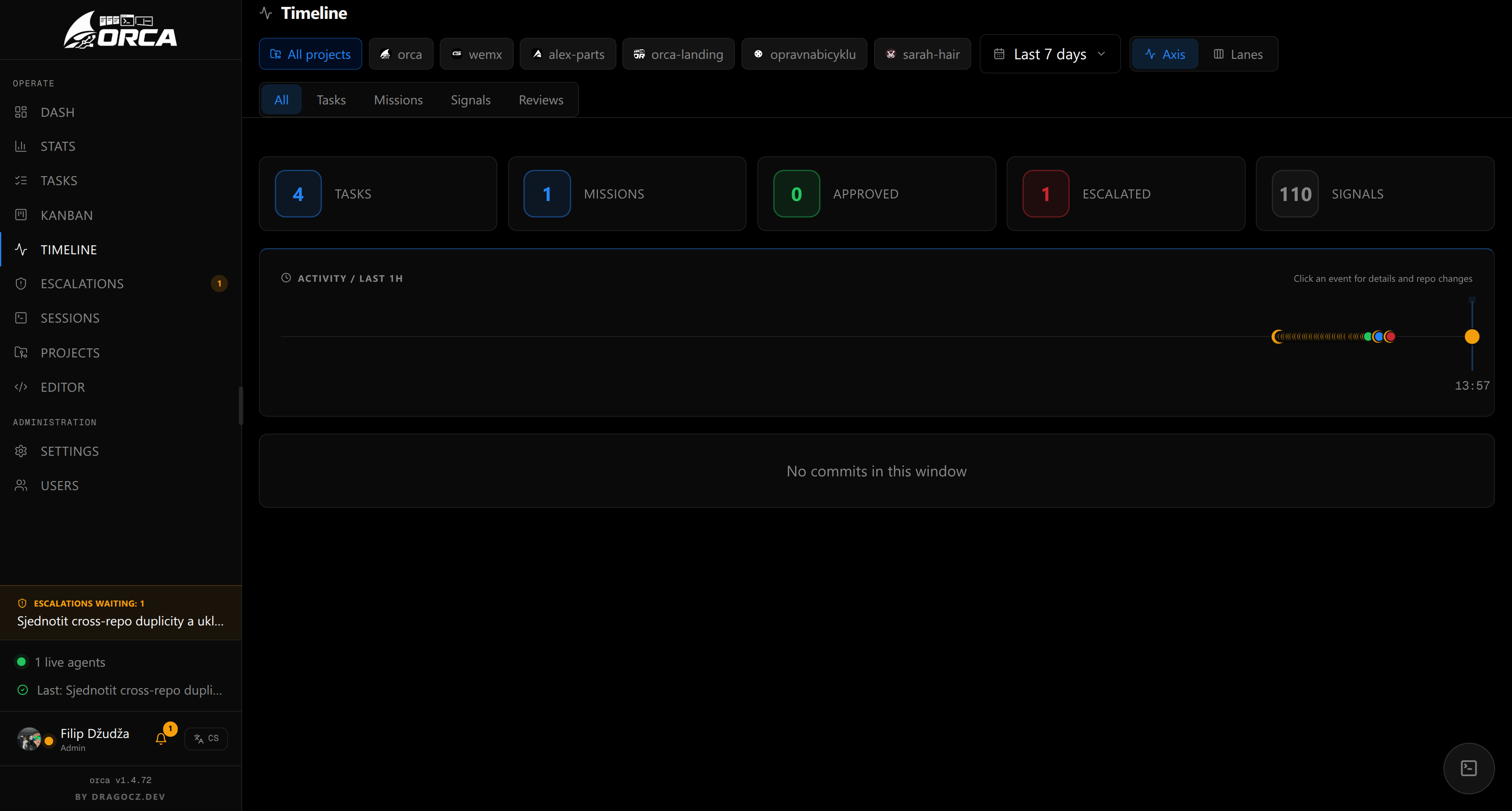 |
Sessions — real-time tmux agent previews with one-click intervention. 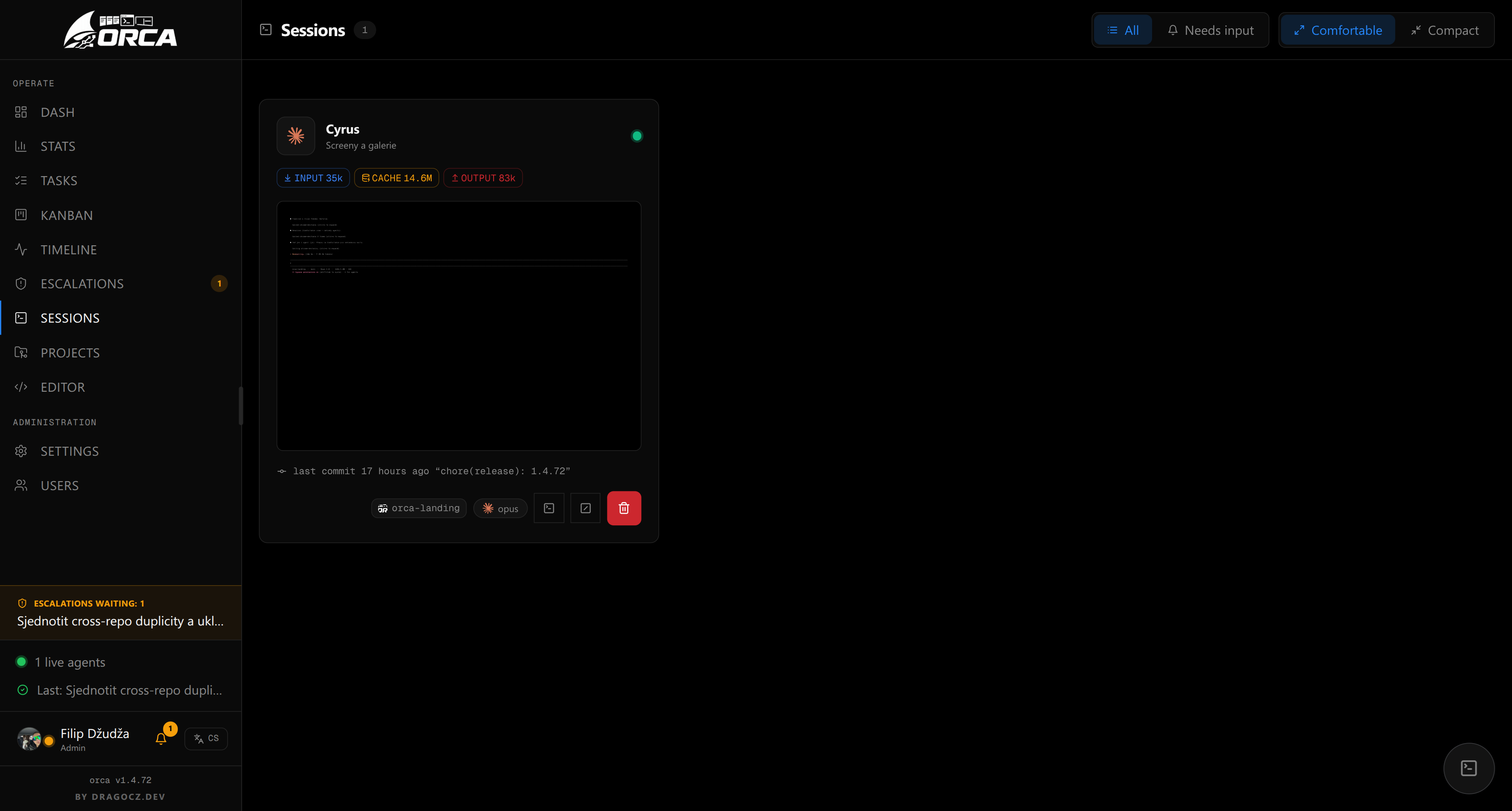 |
Terminal — an interactive real-PTY agent terminal you type straight into, including human-in-the-loop approvals. 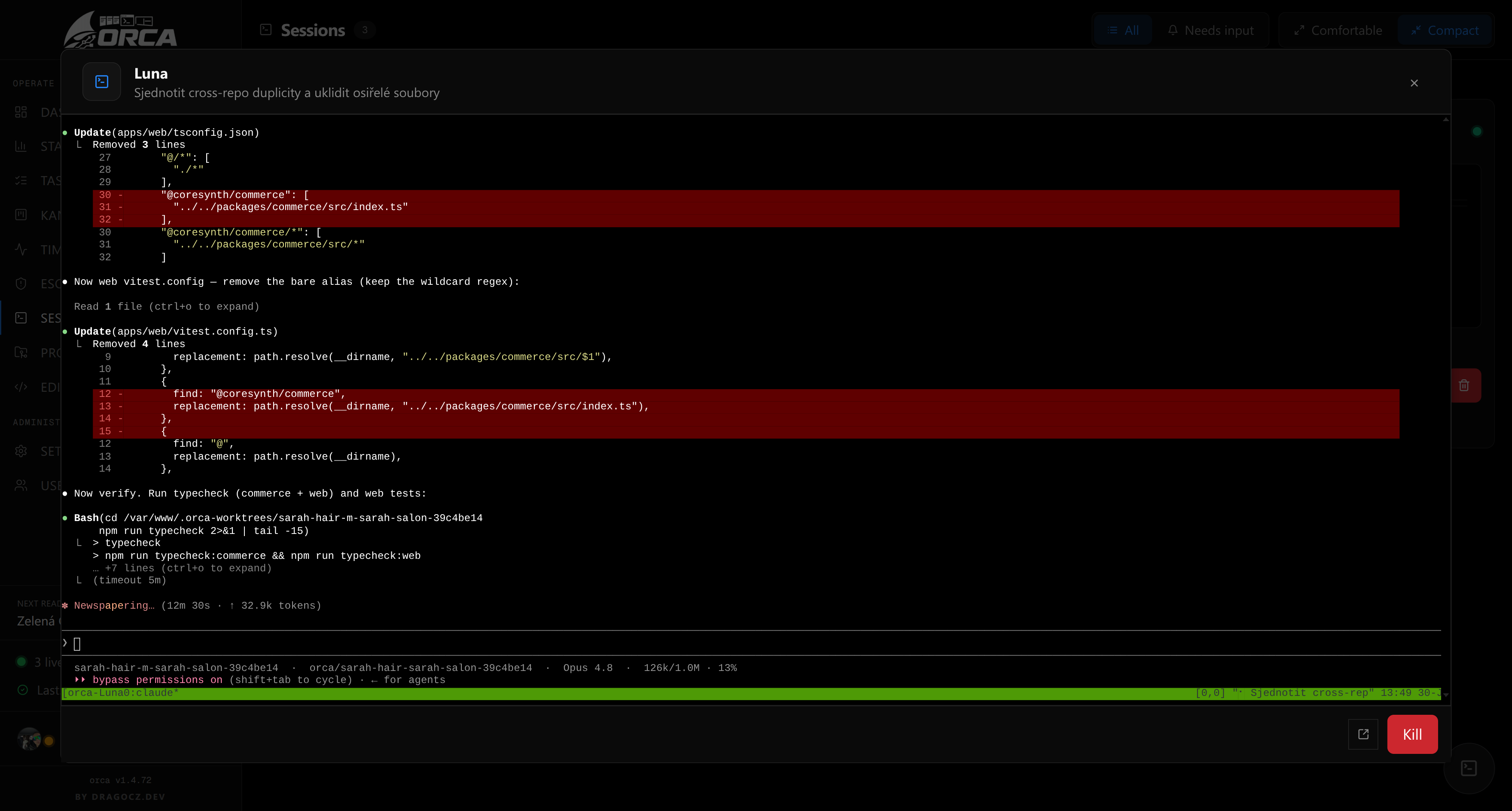 |
Pop-out terminal — pull any session into its own standalone, chromeless window for focus. 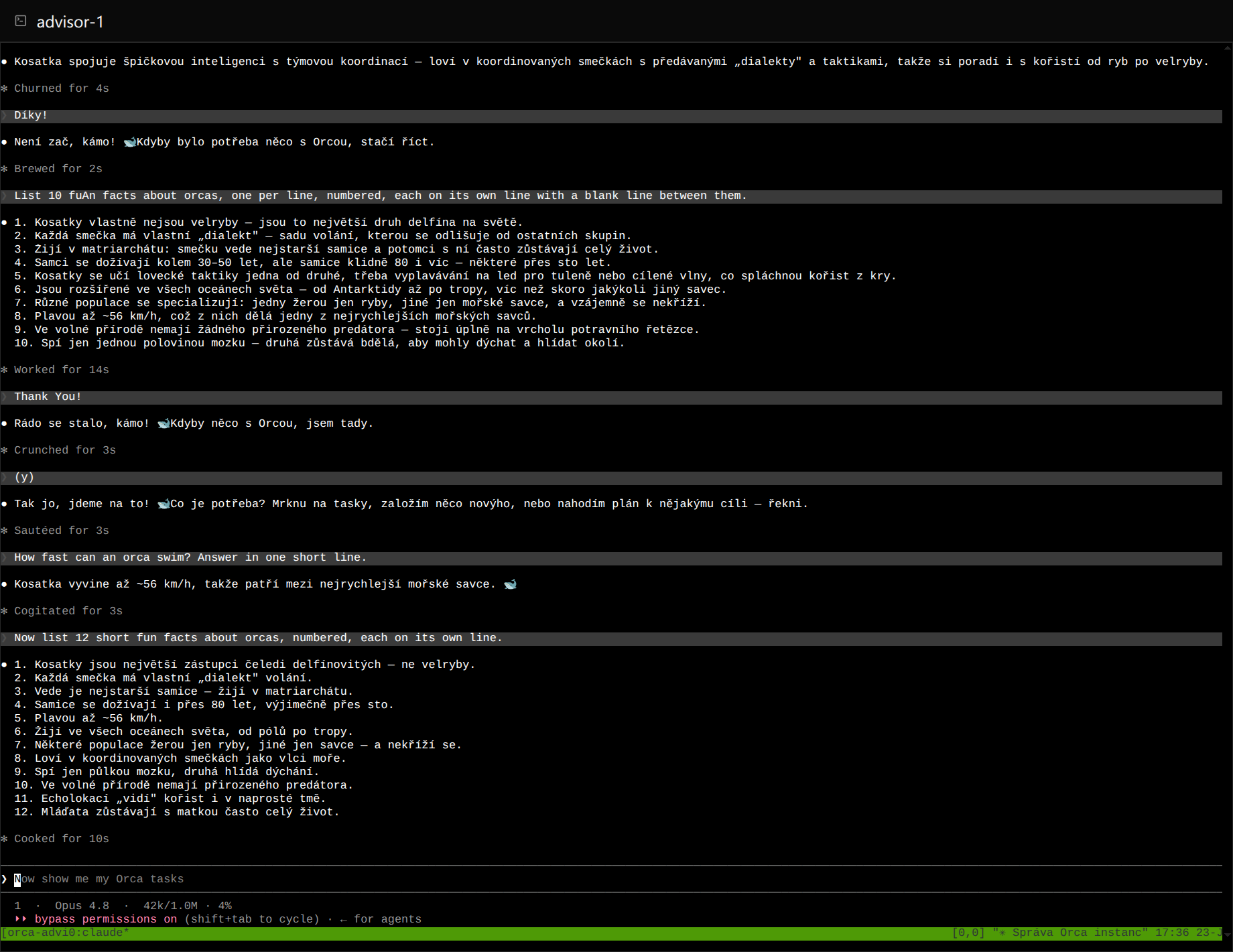 |
Settings — per-model descriptions with brand icons, providers, autopilot, a dedicated GitHub section for the PR-native workflow, and defaults. 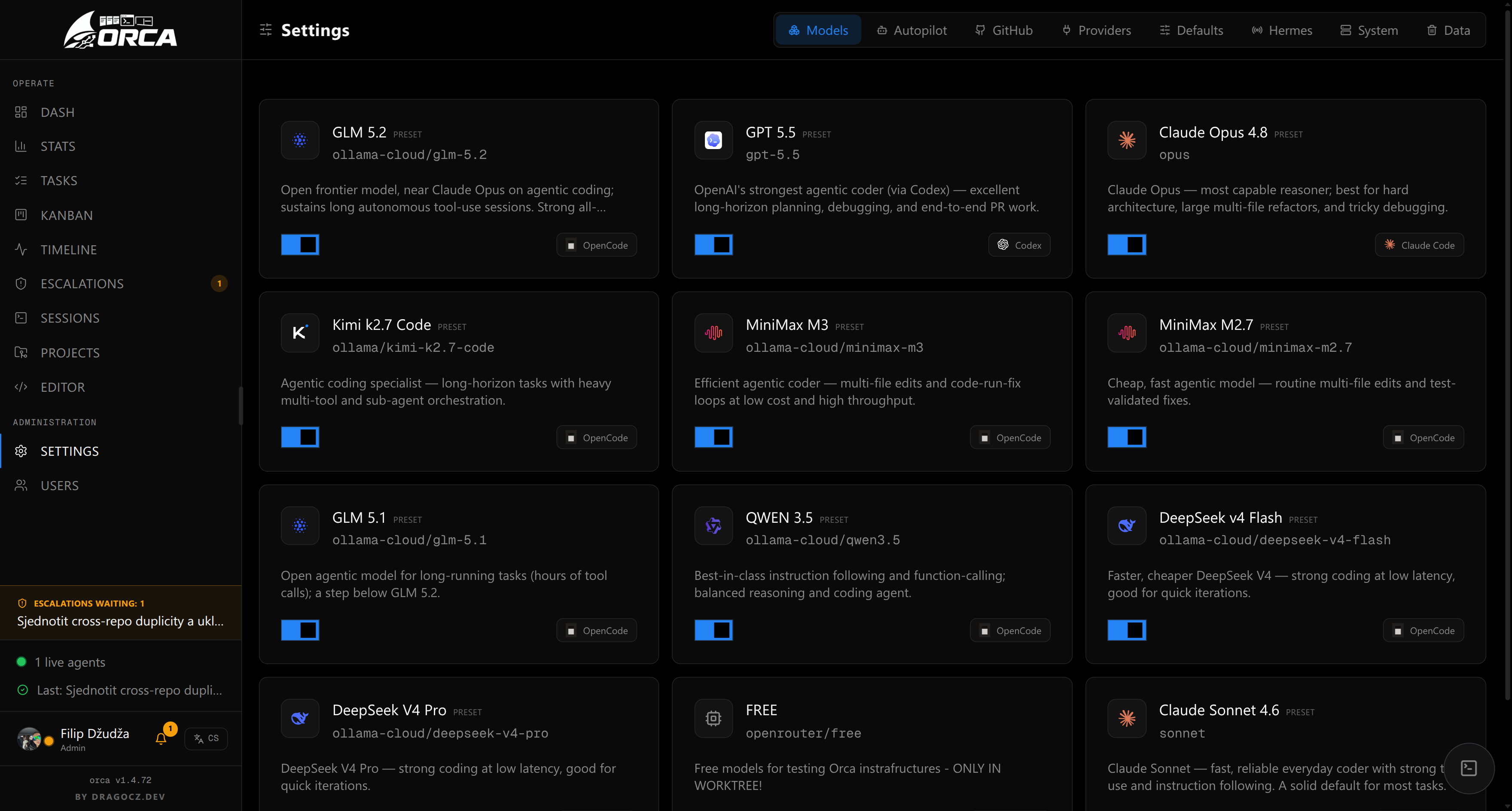 |
Projects — a built-in Monaco editor with the project file tree. 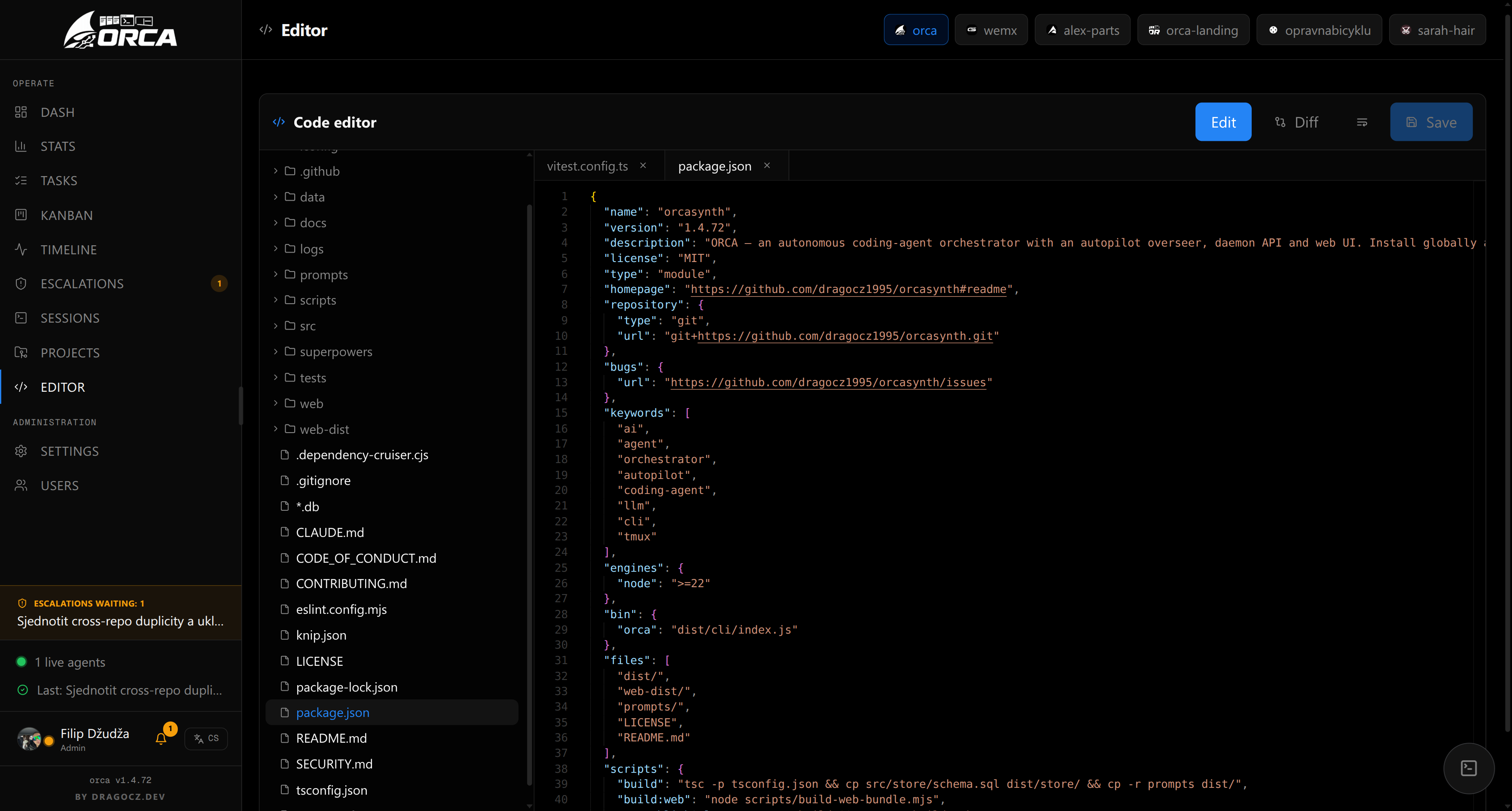 |
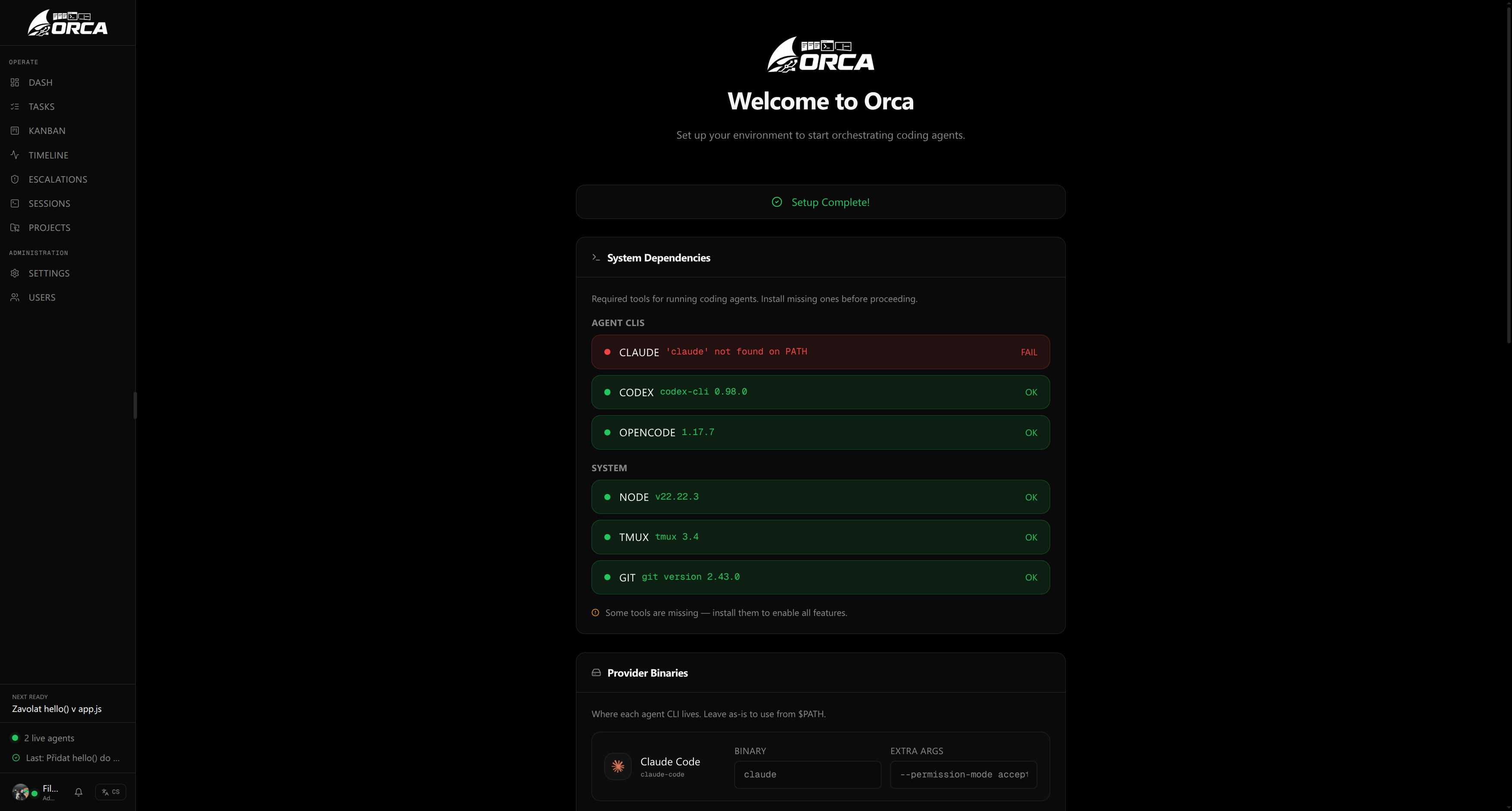
Onboarding — a first-run setup flow that needs no login until the first admin is created.
Install
Install globally from npm — one command brings up the daemon and the web UI:
npm install -g orcasynth
orca # interactive menu: start/stop · first-run setup · update · open web
Prefer it non-interactive? The same actions are plain subcommands:
orca up # start the daemon (:4400) + web UI (:4500) in the background
orca status # show what's running
orca down # stop everything
orca update # update to the latest release from npm
orca install # guided provisioning wizard (domain/TLS, ports, first admin)
Requires Node ≥ 22 and tmux. On first run, orca walks you through a quick
setup — admin account, LLM provider + API key, and a default model. Your data (config,
the SQLite database, and logs) lives in ~/.config/orca/ and survives every update.
Interactive terminals use
node-pty, an
optional native dependency. If its native addon can't build on your host, everything
else runs unchanged — the live session previews just fall back to a read-only mirror
instead of a type-into terminal.
Then open http://localhost:4500 and sign in.
Run from source
For development, or to run without a global install. Requires Node ≥ 22 and tmux.
# 1. Daemon (REST API on :4400)
npm install
npm run build
ORCA_BOOTSTRAP_USER=admin ORCA_BOOTSTRAP_PASS=changeme node dist/daemon/index.js
# 2. Web UI (on :4500)
cd web
npm install
npm run build
npm start -- -p 4500
Open http://localhost:4500 and sign in. Configure your LLM provider and models in
Settings → Autopilot / Models, then create a task or engage an autopilot mission.
The CLI talks to the daemon over the REST API and auto-starts it if it isn't running:
node dist/cli/index.js ls # list tasks
node dist/cli/index.js close <id> # close a task
How it works
goal
│
▼
┌───────────┐ phases + deps ┌─────────────┐ spawn ┌──────────────┐
│ Pilot │ ─────────────────► │ Overseer │ ─────────► │ Agent (tmux) │
│ (planner) │ │ (scheduler, │ │ Claude Code / │
└───────────┘ │ decisions) │ ◄───────── │ OpenCode / │
└─────────────┘ signals │ Codex / Kilo /│
│ │ Pi / oh-my-pi │
│ └──────────────┘
│ escalate
▼
human-in-the-loop
The Pilot decomposes a goal into a dependency-ordered set of phases. The Overseer
schedules ready phases, spawns the right Agent for each one in its own tmux session,
and watches the output. A deriver reads each session and emits signals — working,needs_input, complete. When an agent hits a permission prompt, the decision engine
either clears it automatically (high confidence, non-destructive, within the mission's
autonomy level) or escalates it to a human.
With the PR-native workflow enabled, that loop runs against an isolated git worktree
rather than your live checkout: the Overseer commits each approved phase, and on completion
verifies, pushes, and opens a pull request. PR review feedback flows back to the Pilot as
fix phases that land on the same branch — bounded by a fix-round budget so the mission
escalates to a human instead of trading comments with a reviewer indefinitely.
Architecture
A daemon (src/) owns the database and the orchestration loop; the web app (web/)
is a thin client over the REST API + SSE event stream.
| Layer | What lives there |
|---|---|
src/store |
SQLite stores (tasks, missions, agents, config, users, projects, events) via better-sqlite3 |
src/overseer |
mission engine, planner, scheduler, decision engine, stuck-detector, janitor |
src/spawn · src/tmux |
agent command building + tmux driver |
src/advisor |
per-user assistant lifecycle (start/stop/autostart) + MCP config injection |
src/mcp |
built-in MCP server exposing Orca's toolset to the assistant agent |
src/terminal |
real-PTY WebSocket streaming (node-pty + tmux attach) |
src/deriver |
derives signals from agent output (working / needs_input / complete) |
src/integrations |
per-executor token/cost usage extraction, Hermes MCP registration, CLI detection |
src/api |
Hono REST server + SSE event bus |
src/cli · src/daemon |
the orca CLI (incl. orca api passthrough) and the daemon entrypoint |
web/modules |
feature modules (tasks, kanban, sessions, timeline, projects, advisor, settings, …) |
See docs/ for the documentation hub, API,
architecture, concepts, CLI,
development, deployment, and web UI guides.
Development
npm test # daemon tests (vitest)
npm run build # typecheck + build (also copies schema.sql + prompts/)
npm run build:web # standalone web UI bundle
npm run serve # daemon dev mode (direct TS via --experimental-strip-types)
npm run lint # ESLint (unused imports, hook deps)
npm run depcruise # dependency-cruiser architecture checks (no cycles, layer boundaries)
cd web && npm test # web tests
cd web && npm run dev # web dev server (turbopack)
See docs/DEVELOPMENT.md, docs/TESTING.md,
and docs/WEB.md.
Contributing
Contributors are welcome — whether it's a bug fix, a new feature, or just an idea.
- 💡 Have a suggestion? Open a feature request and tell us what would make Orcasynth better.
- 🐛 Found a bug? File a bug report.
- 🔧 Want to hack on it? Read CONTRIBUTING.md, open a PR, and check the Code of Conduct.
Star the repo if you find it useful — it helps others discover the project.
License
Reviews (0)
Sign in to leave a review.
Leave a reviewNo results found