ardupilot-mcp-server
mcp
Uyari
Health Uyari
- License — License: GPL-3.0
- Description — Repository has a description
- Active repo — Last push 0 days ago
- Low visibility — Only 7 GitHub stars
Code Gecti
- Code scan — Scanned 1 files during light audit, no dangerous patterns found
Permissions Gecti
- Permissions — No dangerous permissions requested
Bu listing icin henuz AI raporu yok.
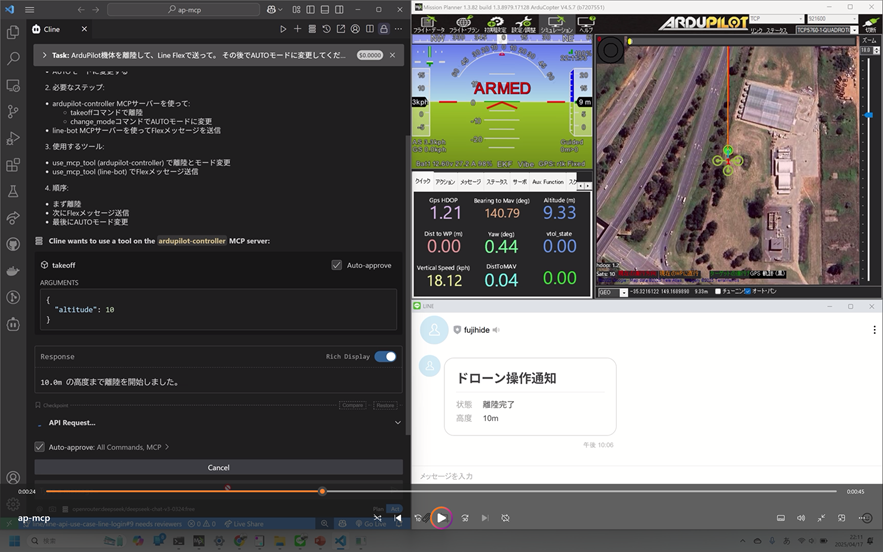
ArduPilotドローンをAIエージェントから操作するMCPサーバーです。
README.md
ArduPilot MCP Server Sandbox
ArduPilot ドローンをLLMと連携して自然言語で操作するMCPサーバーです。
Claude DesktopやCline などMCPホストから利用可能です。
https://youtu.be/y1WE1cDC54Y?si=iy6vdGl38aTRcFcF
動作環境(SITLテスト可能)
- ArduPilot (SITL or 実機)
- MAVLink 通信が
tcp:127.0.0.1:5762で受け付け可能であること - Python 3.10+
Mission Planner のシミュレータを使う場合
ArduPilotドローンのシミュレーションを簡単に試すには、Mission Planner の内蔵シミュレータを使うのが便利です。
- Mission Planner をインストール
- 起動後、上部メニューの
シミュレーションボタンをクリック - 次の画面で
Multirotor(マルチローター)を選択 - ダイアログの
Stableボタンをクリック - ArduPilotシミュレータが起動し、tcp:127.0.0.1:5762 で待ち受けを開始します

セットアップ手順
Python 環境の準備
- Python 3.10+ 推奨
- Windows / macOS / Linux 対応
利用可能なツールのインストール
pip install -r requirements.txtMCPサーバーの起動確認(手動実行)
python ardupilot_mcp_server.py「MCPサーバーを起動します...」と出れば準備完了です。
Cline との連携手順
- OpenRouter にサインアップし、APIキーを取得
- VS Code に Cline 拡張機能 をインストール
- VS Code の settings.json に以下を追加:
※ python のパスや PYTHONPATH は環境に応じて調整してください。{ "cline.apiKey": "sk-xxxxxxx", "cline.apiBaseUrl": "https://openrouter.ai/api/v1", "cline.defaultModel": "deepseek/deepseek-chat-v3-0324:free", "cline.mcpServers": { "ardupilot-controller": { "command": "python", "args": [ "${workspaceFolder}/ardupilot_mcp_server.py" ], "env": { "PYTHONPATH": "${env:USERPROFILE}\\.local\\lib\\python3.12\\site-packages" } } } }
Claude Desktop からの使用方法(GUI連携)
Claude Desktop をインストール
設定ファイル
claude_desktop_config.jsonを開くWindows の場合:
C:\Users\{ユーザー名}\AppData\Roaming\Claude\claude_desktop_config.json以下を追記:
{ "mcpServers": { "ardupilot-controller": { "command": "python", "args": [ "C:/Users/your-user-name/path/to/ardupilot_mcp_server.py" ], "alwaysAllow": [ "arm", "disarm", "takeoff", "change_mode" ] } } }※ パスは環境に応じて調整してください。
Claude Desktop を再起動
利用できるMCPツール一覧
| コマンド | 説明 |
|---|---|
| arm() | 機体をアームします |
| disarm() | 機体をディスアームします |
| takeoff(altitude=10.0) | 指定高度まで離陸します |
| change_mode(mode="GUIDED") | モードを変更します |
| get_position() | 現在位置を取得します |
| clear_mission() | 機体上のミッションを消去します |
| download_mission() | 機体上のミッションを取得します |
| upload_star_mission(altitude=15.0, outer_radius=50.0, inner_radius=20.0, points=5) | 現在位置を中心に星形ミッションを作成してアップロードします |
| start_mission() | AUTOモードに変更してミッション開始状態にします |
プロンプト例(チャットでの操作)
Cline、または Claude Desktop に話しかけて、ArduPilot を自然言語で操作できます:
- 「ArduPilotをアームして」
- 「10メートルまで離陸して」
- 「モードをGUIDEDに変更して」
- 「高度15m、半径50mの星形ミッションを作って機体にアップロードして」
- 「ArduPilotをディスアームして」
※ MCP サーバーに登録されているツールに応じて、自然文が自動で変換されます。
Yorumlar (0)
Yorum birakmak icin giris yap.
Yorum birakSonuc bulunamadi